電験1種過去問【2013年機械制御 問4】
【自動制御】現代制御におけるフィードバック制御系の解析《計算問題》
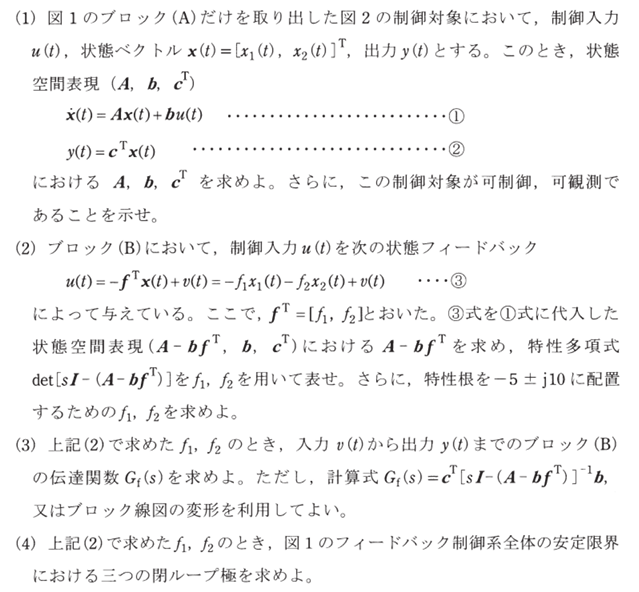
図1のフィードバック制御系において、r(t)は目標値、e(t)は偏差、v(t)は入力、u(t)は制御入力、x₁(t)、x₂(t)は状態、y(t)は出力を表す。また、ゲイン K は正、上付添字 T は転置を表し、I は単位行列を表す。このとき、次の問に答えよ。
解答と解説はこちら
解答
公式標準解答


解説
現代制御からの出題です。一種では現代制御が出題されることが多いです。この問題は、古典制御のブロック図から現代制御への考え方へ結びつく内容も含まれており、総合力が問われる出題形式なので、しっかり理解して類題に備えたいところです。
難易度4(★★★★☆)
標準解答の補足
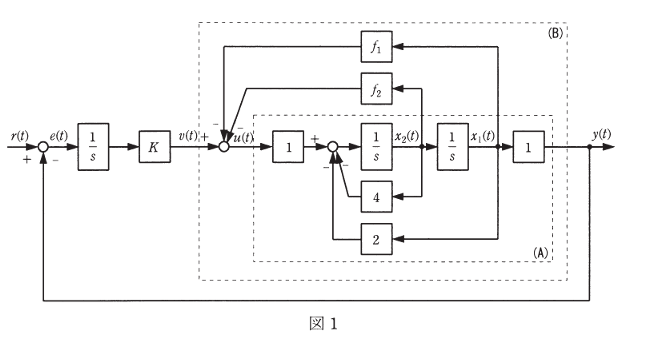
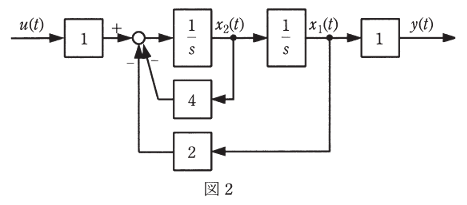
(1)x₁(t)、x₂(t)それぞれをラプラス変換したものを、X₁(s)およびX₂(s)とすると、ブロック図より
X₁(s)=\(\frac{1}{s}\)X₂(s)
sX₁(s)=X₂(s)
上式を逆ラプラス変換すると、(左辺はsX₁(s)-x₁(0)であるが、題中に与えられていないのでx₁(0)=0とみなす)
\(\dot{x_1}(t)=x_2(t)\)
同様に、u(t)をラプラス変換したものを、U(s)とすると、ブロック図より
X₂(s)=\(\frac{1}{s}\)(-2X₁(s)-4X₂(s)+U(s))
sX₂(s)=-2X₁(s)-4X₂(s)+U(s)
上式を逆ラプラス変換すると、(左辺はsX₂(s)-x₂(0)であるが、題中に与えられていないのでx₂(0)=0とみなす)
\(\dot{x_2}(t)=-2x_1(t)-4x_2(t)+u(t)\)
追加学習は自動制御の学習帳で