電験1種過去問【2015年機械制御 問4】
【自動制御】現代制御におけるフィードバック制御系の解析《計算問題》
次の微分方程式で表されるシステムについて、次の問に答えよ。ただし、上付添字 T は転置を表し、I は単位行列を表す。
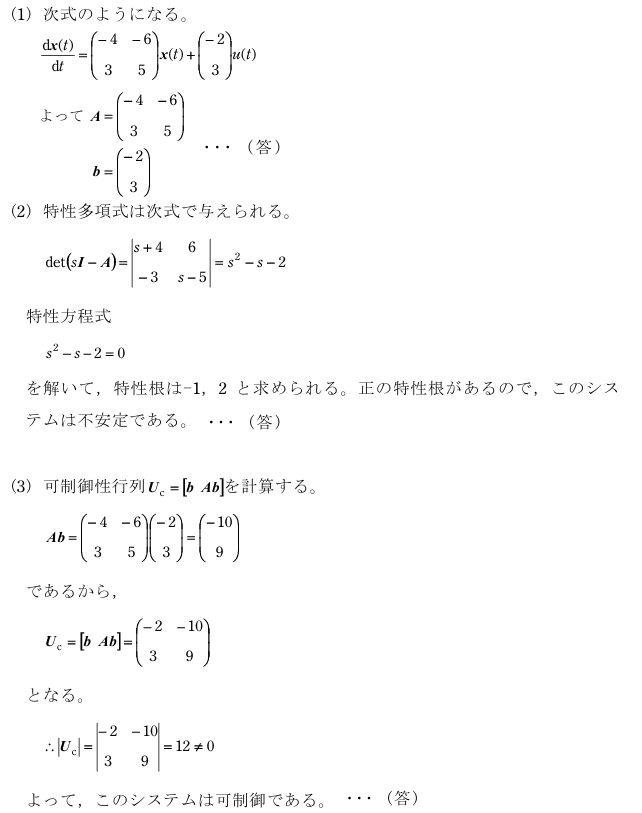
\(\frac{dx_1(t)}{dt}=-4x_1(t)-6x_2(t)-2u(t)\) \(\frac{dx_2(t)}{dt}=3x_1(t)+5x_2(t)+3u(t)\)(1)制御入力を u(t)、状態変数を x(t) = [x₁(t) x₂(t)]T として、このシステムを次に示す状態方程式の形で表すとき、A 及び b を求めよ。
\(\frac{d\boldsymbol{x}(t)}{dt}=\boldsymbol{Ax}(t)+\boldsymbol{bu}(t)\)(2)制御入力を零としたときのシステムの安定性を特性方程式の根を計算することで判別せよ。
(3)システムの可制御性を可制御性行列を用いて判別せよ。
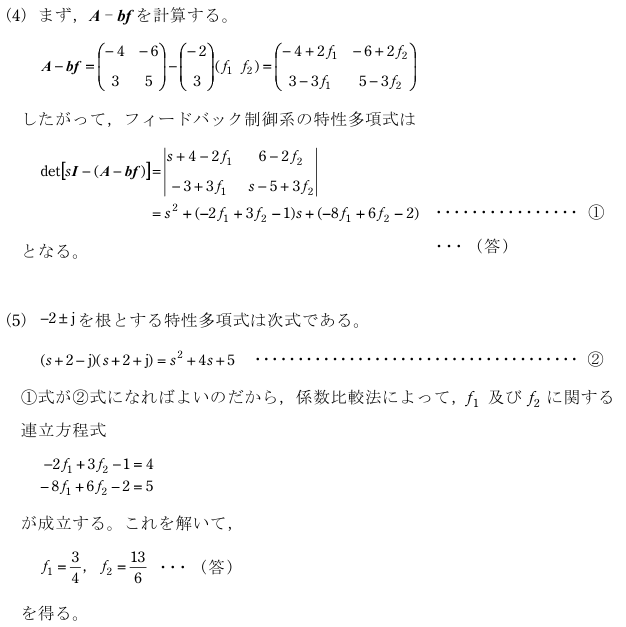
(4)制御入力 u(t) を次の状態フィードバック
u(t) = –fx(t), f = (f₁ f₂)
で与える。フィードバック制御系の特性多項式 det[sI-(A–bf)] を f₁ 及び f₂ を用いて表せ。
(5)フィードバック制御系の特性根を -2±j に配置するための f₁ 及び f₂ を求めよ。
解答と解説はこちら
解答
公式標準解答
解説
自動制御の、現代制御からの出題です。一種では現代制御が出題されます。類題の多い出題形式なので、しっかり理解して得点源としたい問題です。
難易度2(★★☆☆☆)
追加学習は自動制御の学習帳で