電験2種過去問【2022年機械制御 問4】
【自動制御】古典制御、特性方程式、安定条件、定常速度偏差《計算問題》
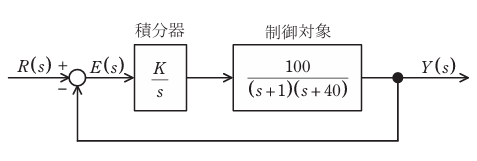
図に示すフィードバック制御系について、次の問に答えよ。ただし、 R(s) は目標値、 Y(s) は制御量、 E(s) は制御偏差であり、時間信号 r(t)、 y(t)、 e(t)、をそれぞれラプラス変換したものである。
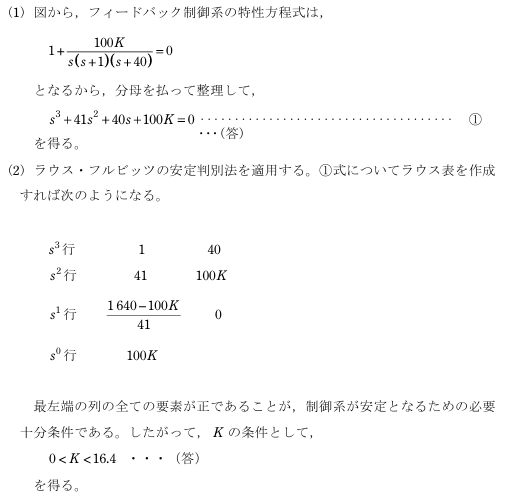
(1)フィードバック制御系の特性方程式を求めよ。
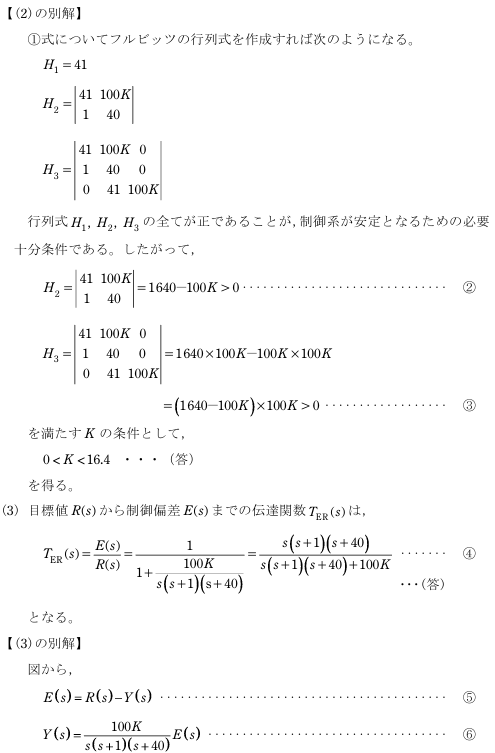
(2)フィードバック制御系を安定とする K の条件を求めよ。
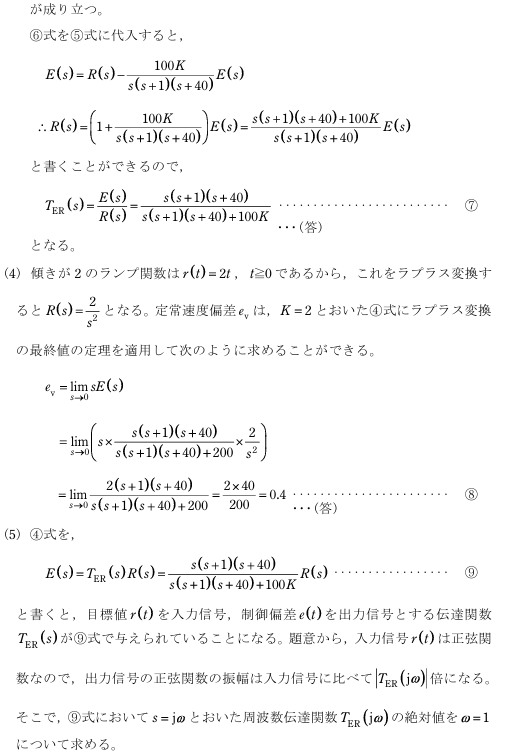
(3)目標値 R(s) から制御偏差 E(s) までの伝達関数 TER(s) を求めよ。
(4)K=2 とおく。目標値 r(t) を傾き 2 でランプ変化させたときの定常速度偏差 ev を求めよ。
(5)K=2 とおく。正弦関数 2sint で表される目標値 r(t) に対し、定常状態での制御偏差 e(t) は Bsin(t+θ) で表せれる正弦関数となった。B の値を求めよ。
解答と解説はこちら
解答
公式標準解答
解説
古典制御からの出題です。二種では古典制御からの出題が多いです。類題の多い出題であるので、力試しにぴったりです。(5)については一ひねりしてあり、付け焼き刃では解けない問題です。
標準解答の補足
(5)伝達関数 TER(s) の絶対値をω=1と置く理由。
題意より入力信号 r(t) は正弦関数である。sin波であるので、ωをどのような値にとっても、利得( TER(s) の絶対値)は同じである。ω=1であれば、計算が簡単になるのでω=1と置く。
追加学習は自動制御の学習帳で