電験1種過去問【2016年機械制御 問4】
【自動制御】現代制御におけるフィードバック制御系の解析《計算問題》
次式で記述される制御対象について、次の問に答えよ。
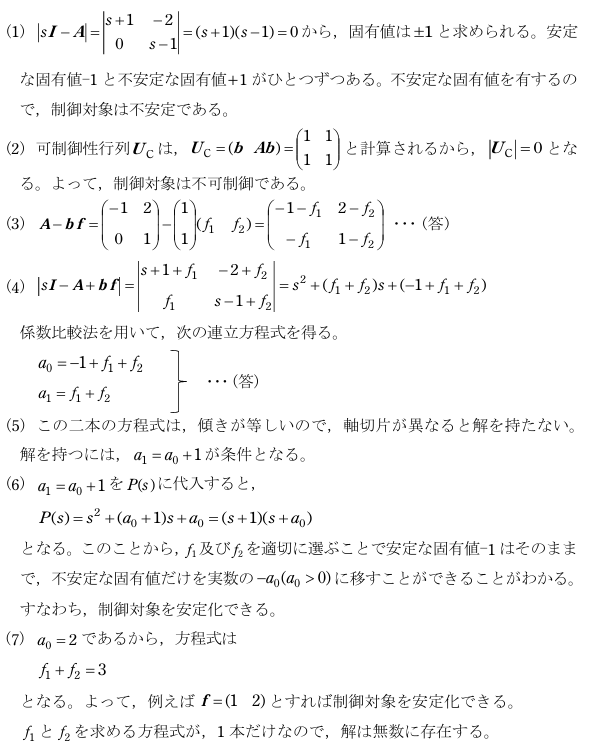
\(\boldsymbol{\dot{x}}= \boldsymbol{Ax}(t)+ \boldsymbol{b}u(t) \) \(\boldsymbol{A}= \begin{pmatrix} -1&2\\ 0&1 \end{pmatrix}, \boldsymbol{b}= \begin{pmatrix} 1\\ 1 \end{pmatrix} \)(1)システム行列Aの固有値を計算して、u(t)=0 のとき制御対象は不安定であることを示せ。
(2)可制御性行列を計算することで、制御対象は不可制御であることを示せ。
(3)この制御対象に状態フィードバック制御 u(t)=-fx(t) を施す。係数ベクトル f を f=(f₁ f₂)として、閉ループ系のシステム行列 A–bf を求めよ。
(4)閉ループ系の特性多項式| sI–A–bf | を、f₁ と f₂ を用いて表せ。指定したい特性多項式を P(s)= | sI–A–bf | = s²+a₁s+a₀ とおく。a₀ と a₁ を、f₁ と f₂ で表せ。
(5)上記小問(4)で求めた関係式を f₁ と f₂ を求める方程式と考えるとき、この方程式が解をもつために、a₀ と a₁ が満たすべき条件を示せ。
(6)上記小問(5)で求めた関係式を用いて P(s)=s²+a₁s+a₀ の係数 a₁ を代入消去したうえで、P(s) を因数分解せよ。この結果から、制御対象を安定化できることを示せ。
(7)不安定な固有値を -2 に移動することで制御対象を安定化せよ。これを実現する状態フィードバック係数ベクトル f は無数に存在することを示せ。
解答と解説はこちら
解答
公式標準解答
解説
自動制御の、現代制御からの出題です。一種では現代制御が出題されます。類題の多い出題形式なので、しっかり理解して得点源としたい問題です。
難易度4(★★★★☆)
追加学習は自動制御の学習帳で