電験2種過去問【2009年機械制御 問4】
【自動制御】古典制御、持続振動、定常速度偏差、制御系の挙動《計算問題》
図に示すフィードバック制御系について、次の問に答えよ。ただし、 R(s) は目標値、U(s) は操作量、Y(s) は出力、E(s) は偏差であり、時間信号 r(t)、u(t)、y(t)、e(t) をそれぞれラプラス変換したものである。
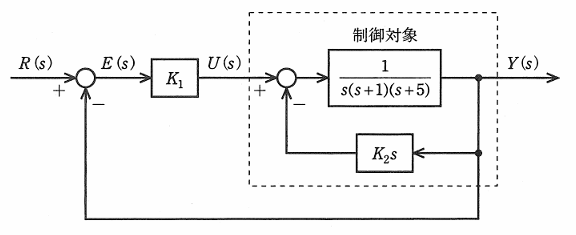
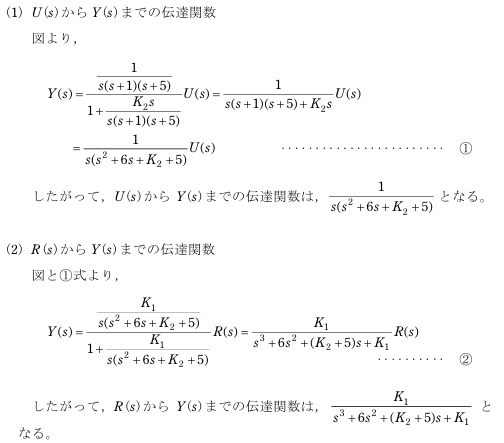
(1)点線で囲まれたブロック線図だけを取り出したとき、 U(s) から Y(s) までの伝達関数を求めよ。
(2)R(s) から Y(s) までの伝達関数を求めよ。
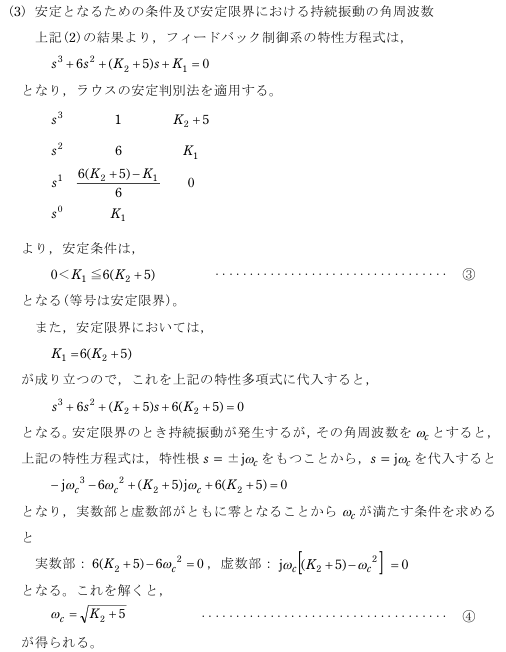
(3)図のフィードバック制御系が安定となるための K₁ と K₂ が満たすべき条件及び安定限界における持続振動の角周波数 ωc を K₂ を用いて表せ。
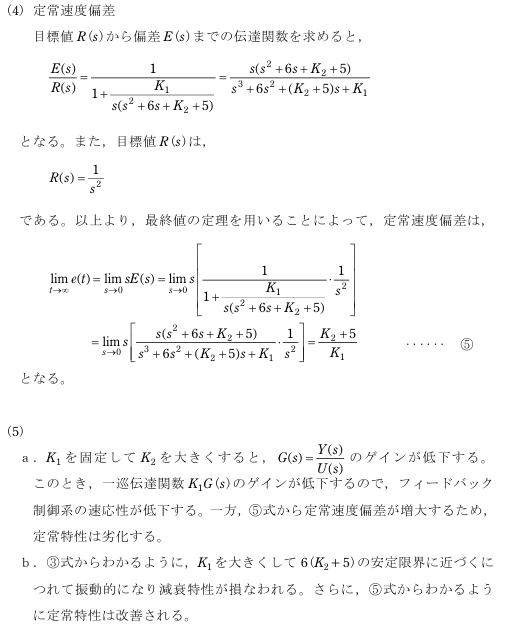
(4)目標値 r(t) がランプ関数 r(t) = t のときの定常速度偏差を求めよ。
(5)図のフィードバック制御系が安定となるように K₁ と K₂ が選ばれるとする。上記(3)及び(4)の結果を踏まえて、以下の問に答えよ。
a.K₁ を固定したとき、K₂ を大きくすると、速応性と定常特性はどのように変化するかを理由とともに答えよ。
b.K₂ を固定したとき、K₁ を大きくすると、減衰特性と定常特性はどのように変化するかを理由とともに答えよ。
解答と解説はこちら
解答
公式標準解答
解説
古典制御からの出題です。二種では古典制御からの出題が多いです。(1)(2)は基本的な内容ですが、(3)以降徐々に難易度が増していき、(5)はしっかり理解できていないと回答が難しくなってきます。自動制御を選択する想定であれば、しっかり理解しておきたいところです。
標準解答の補足
(3) 安定限界で持続振動するとき、特性方程式の特性根は実部が零の共役複素数となる。
追加学習は自動制御の学習帳で